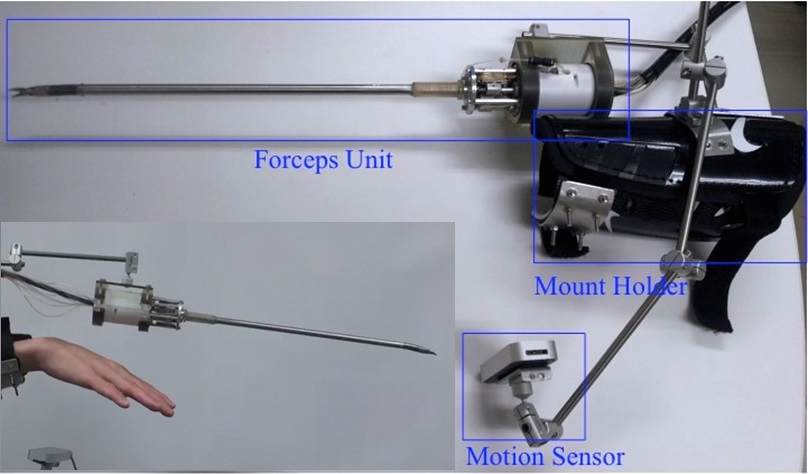
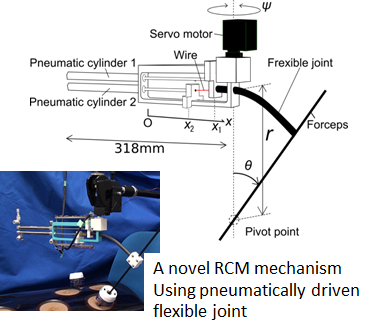
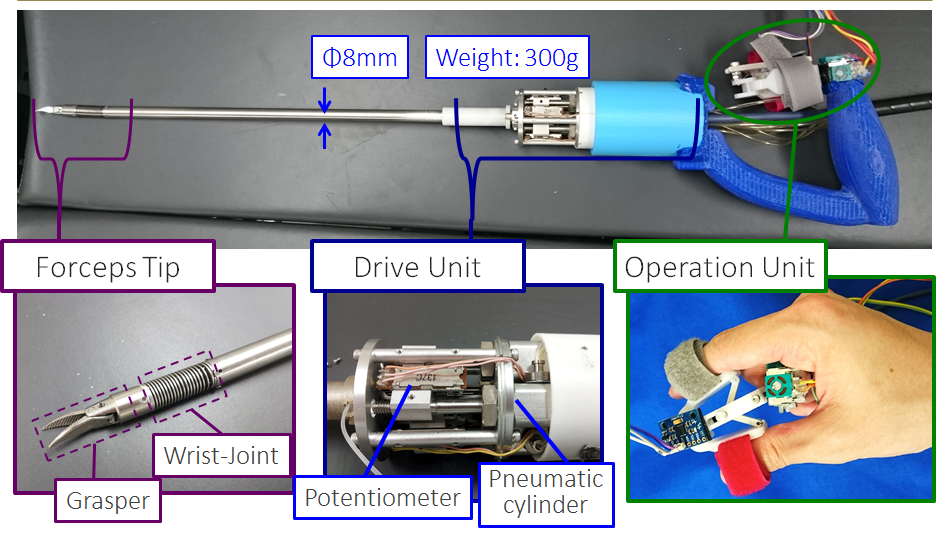
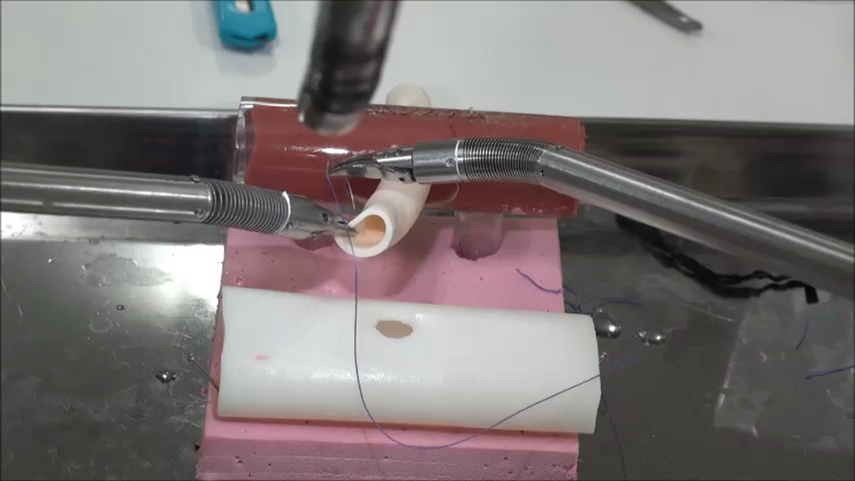
低侵襲手術用鉗子マニピュレータの開発
人間の生体力学的特性を考慮した,操作しやすい多自由度,多機能かつ細径化を実現した鉗子マニピュレータを設計製作し, その有効性を実験によって明らかにしています.
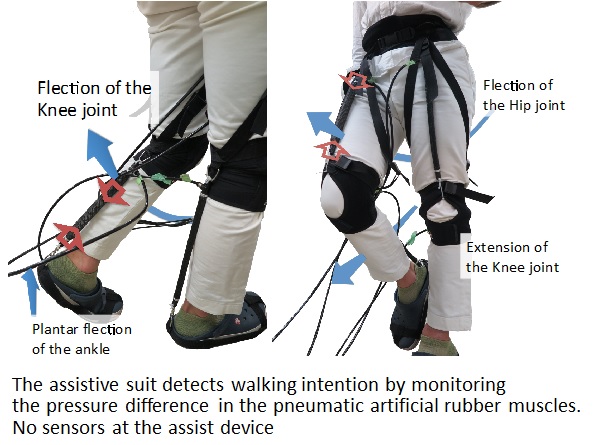
空気圧駆動を用いたパワーアシスト装置の開発
人間の二関節駆動等の生体力学的な特徴を踏まえて,人間親和性に優れた空気圧駆動を用いたパワーアシスト装置を提案試作してい ます.

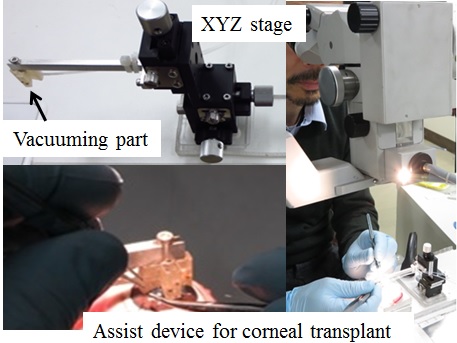
ソフトアクチュエータを用いた医療用デバイスの開発
ソフトアクチュエータを提案試作し、それを空気圧駆動する医療用デバイスの提案・試作とその評価を行っています.

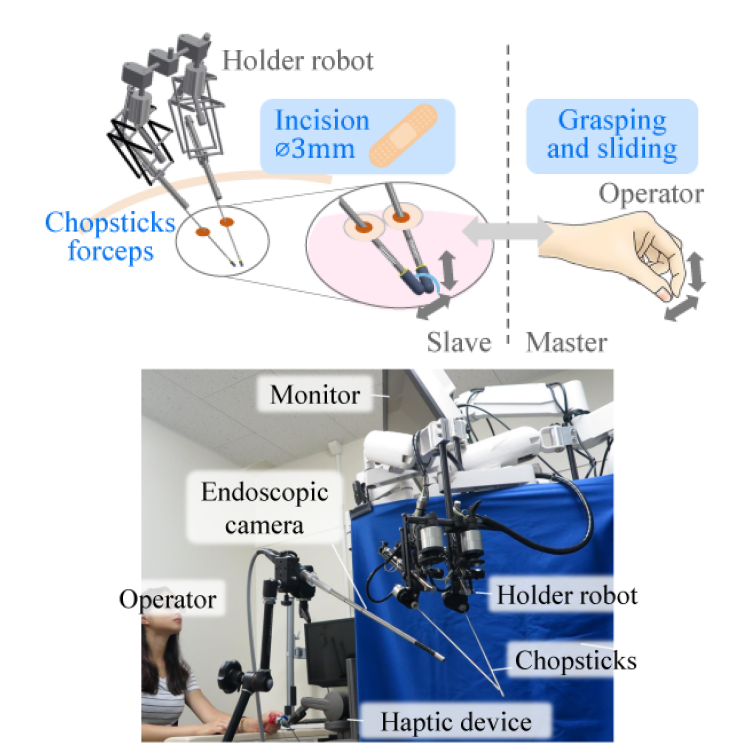
手術支援ロボットシステムに関する研究
力覚提示機能を有する遠隔操作が可能なマスタスレーブ型手術支援ロボットシステムの開発とその制御方法を探求しています. また本学医学部と連携して動物実験等によるシステムの評価を実施しています.

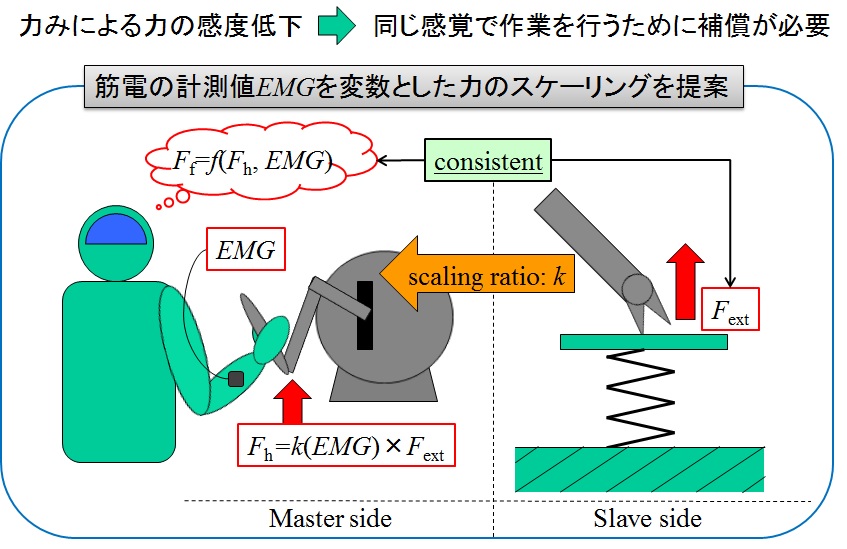
生体情報を用いたロボットの遠隔制御
マスタデバイスの操作において,操作者の力み具合等を生体信号から測定,その特性を考慮したマスタスレーブシステムの制御方法 や,通信遅れがある場合にも安定して動作する遠隔制御方法を提案しています.