


プロジェクト
科研費 基盤研究A 手術ロボットの関節情報と画像からの空間情報を融合した最適経路探索による誘導制御の研究を実施しています.科研費 挑戦的研究(開拓) 気液相変化を用いた大変形可能なマイクロ群体ロボットの提案とその計測制御方法の探求の研究を実施しています.
科研費 基盤研究C 人と調和し訓練効果を最大化するロボット装着型トレーニングの研究を実施しています(宮嵜哲郎講師).
科研費 若手研究 医用AIのための擬似医療データセットの設計と活用に関する統合的研究の研究を実施しています(曽我部舞奈助教).
ACT-X 正解ラベルのない生体情報のための逆問題的アプローチの研究を実施しています(曽我部舞奈助教).
Bio-robotic Control
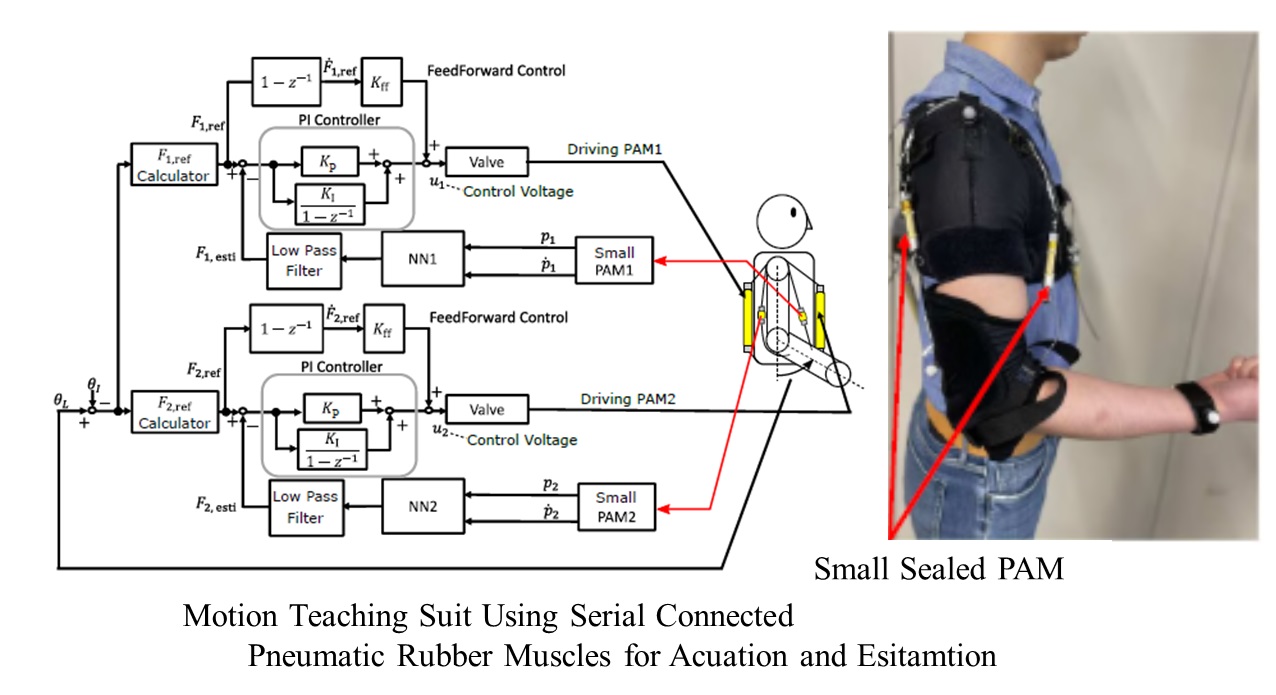
視覚とパワーアシスト装置を用いた力覚の同時提示による運動教示システム
視覚提示×人間機械協調×動作支援
ヘッドマウントディスプレイなどを用い視覚を通じて脳に働きかけることに加えて,
空気圧ゴム人工筋を用いた柔らかさを有するパワーアシスト装置で身体に運動を直接作用させる
ことによって,身体能力の向上を目指すシステムの研究を行っています.トレーニングの高効率化や高齢者の運動支援への展開を目指しています.
Tetta Kadokura, Tetsuro Miyazaki, Toshihiro Kawase, Maina Sogabe, Kenji Kawashima, Posture estimation by clustering pressure information and control implementation for pneumatically driven gait-assistive robot, IEEE Access, Vol.12, pp.35874-35887, 2023
Tetsuro Miyazaki,Toshihiro Kawase, Takahiro Kanno, Maina Sogabe, Yoshikazu Nakajima, Kenji Kawashima, Running Motion Assistance Using a Soft Gait-assistive Suit and Its Experimental Validation, IEEE Access, Vol.9, pp.94700-94713, 2021
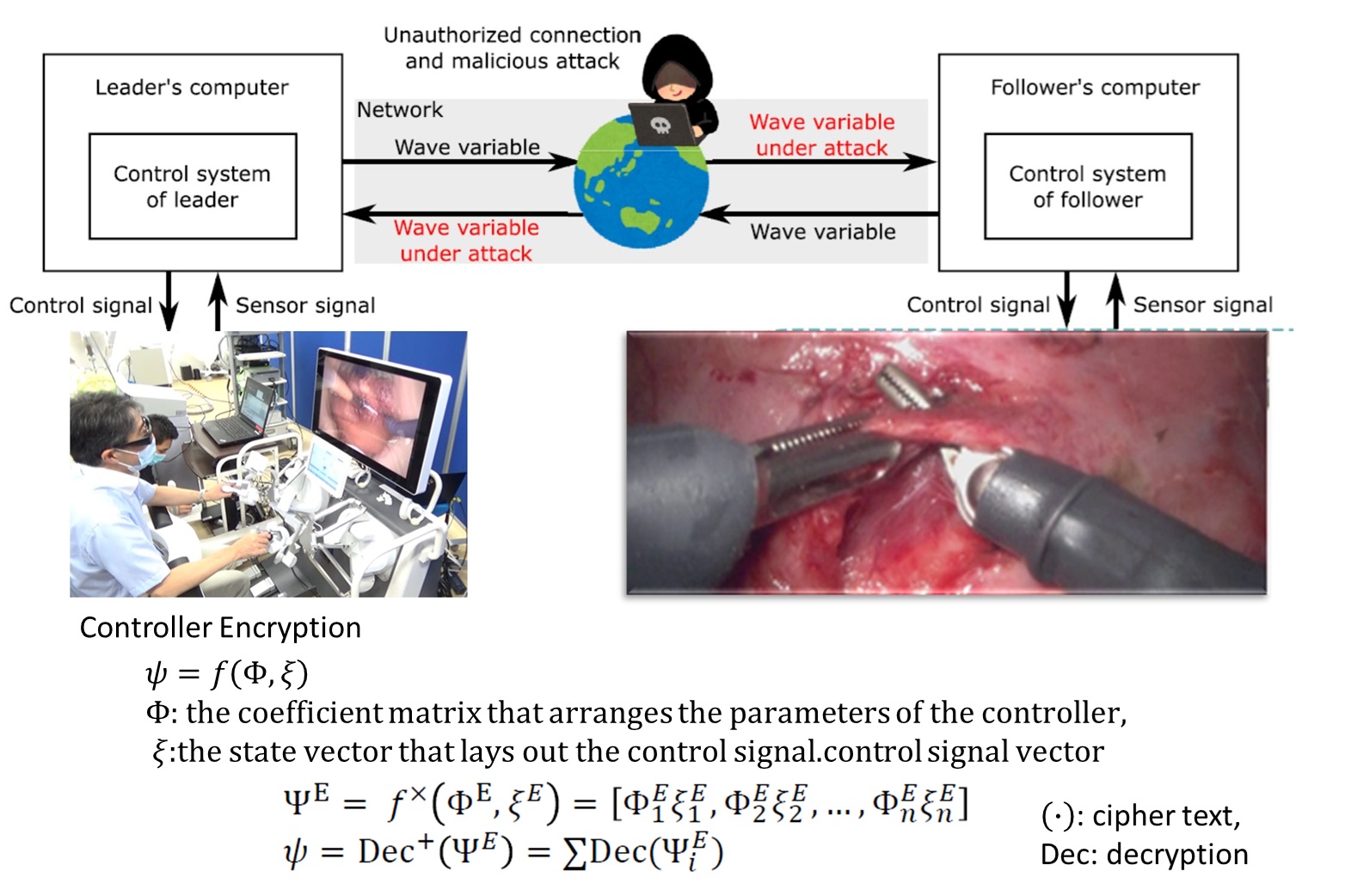
手術支援ロボットの遠隔操作における暗号化制御
手術ロボット×遠隔操作×暗号化
リーダー・フォロワー型の手術支援ロボットなど,ロボットの位置と力を遠隔操作するバイラテラル制御系において,
信号や制御パラメータを秘匿化し,サイバー攻撃に対してロバストな暗号化制御系の構築を目指している
(電気通信大学小木曽研究室との共同研究).
Tetsuro Miyazaki, Naoto Shono, Kaoru Teranishi, Takahiro Kanno, Toshihiro Kawase, Kiminao Kogiso, Kenji Kawashima, Attack detection method for encrypted wave-variable-based bilateral control systems, IET Control Theory & Applications, pp.1–14, 2024
Katsumasa Kosha, Tetsuro Miyazaki, Kaoru Teranishi, Kiminao Kogiso, Kenji Kawashima, Detection and Cancellation of Multiplicative FDI Attack on Bilateral Encrypted Control System, IEEE Access, 2024
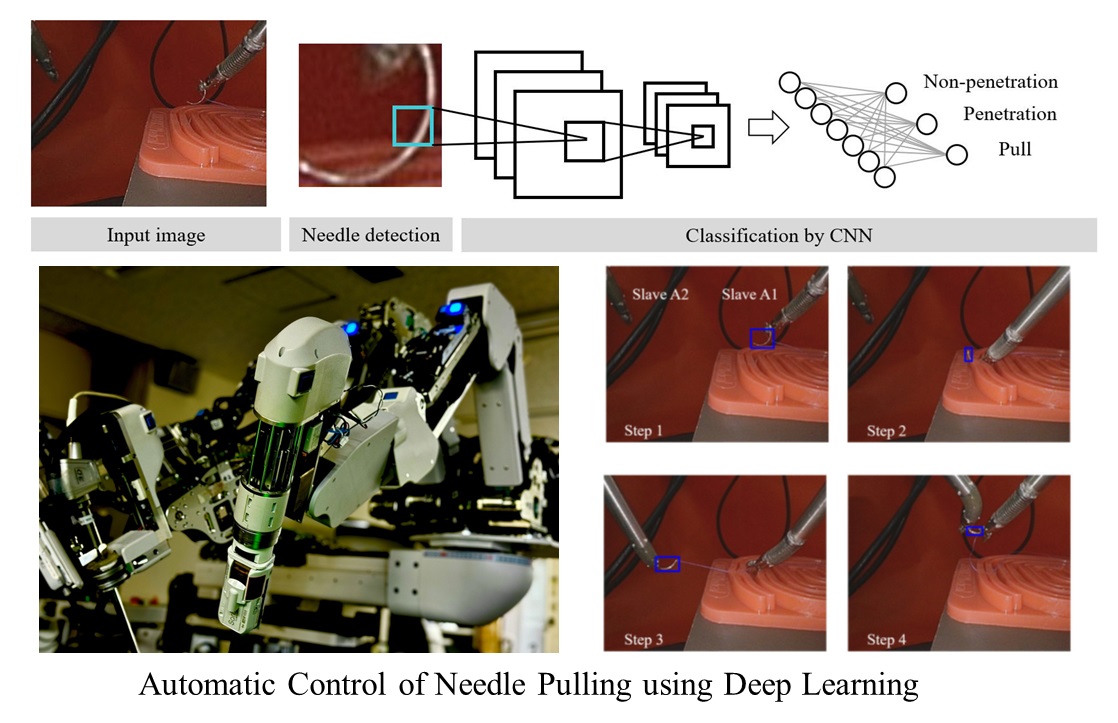
AIを用いた手術支援ロボットの制御に関する研究
手術ロボット×AI×状態推定
内視鏡画像,ロボットの位置や力の情報から機械学習を用いて作業状態の推定や最適経路探索を行う方法を研究しています.
さらにその結果を用いて,自律的に動作するロボットと術者が操作するフォロワーロボットが連携作業を行う制御方法など,
協調制御や自律制御の方法を探求しています.
Takuto Mikada, Takahiro Kanno, Toshihiro Kawase, Tetsuro Miyazaki, and Kenji Kawashima, Suturing support by human cooperative robot control using deep learning, IEEE Access,pp.167739-167746,Vol,8,2020
Mikada Takuto, Takahiro Kanno, Toshihiro Kawase, Tetsuro Miyazaki, Kenji Kawashima, 3D Posture Estimation of Robot Forceps using Endoscope with Convolutional Neural Network, The International Journal of Medical Robotics and Computer Assisted Surgery,16:e2062,2019
Kengo Watanabe, Takahiro Kanno, Kazuhisa Ito, Kenji Kawashima, Single Master Dual Slave Surgical Robot with Automated Relay of Suture Needle, IEEE Transactions on Industrial Electronics, Vol.65, Issue 8, pp.6343-6351, 2018
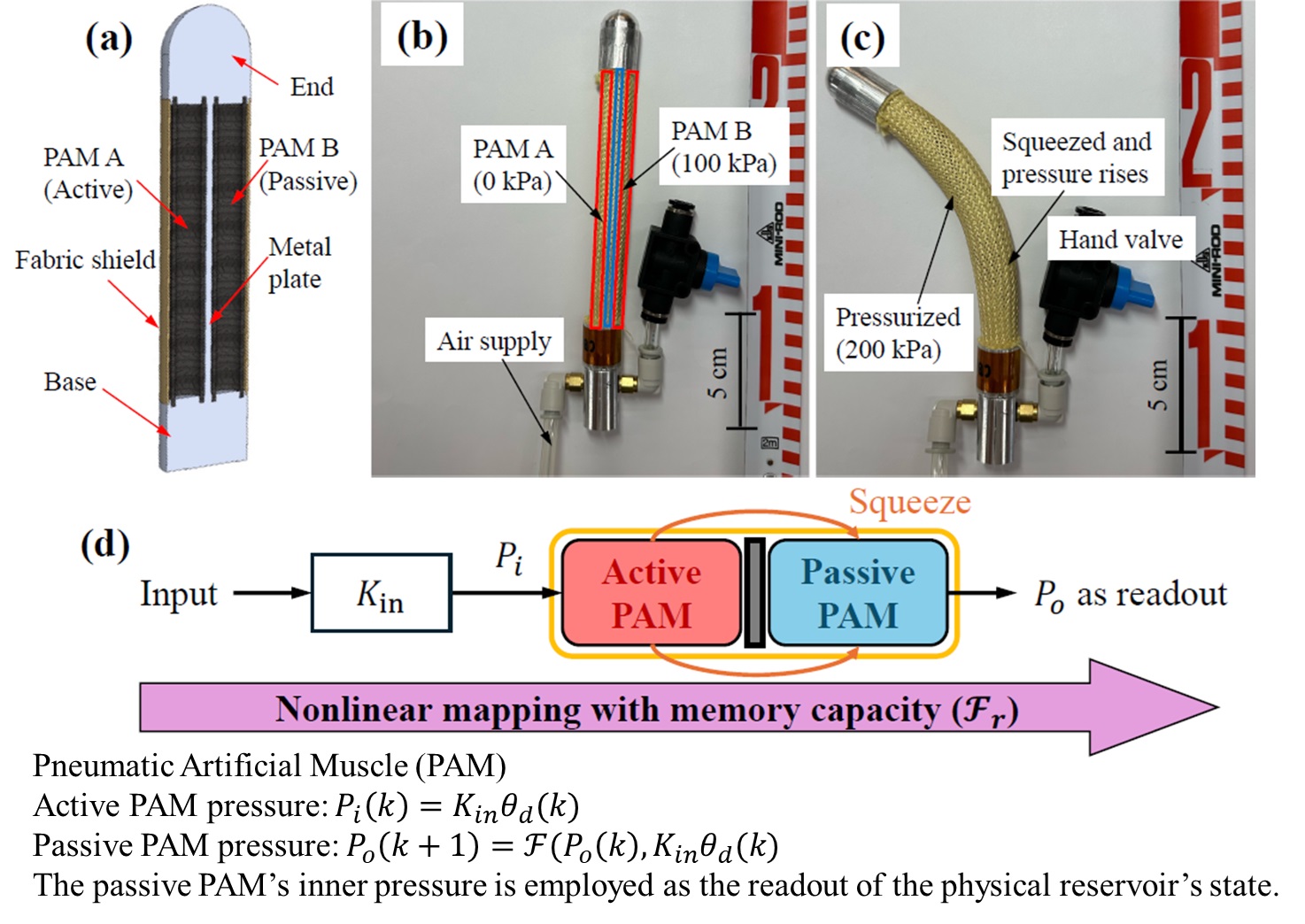
Pneumatic Reservoir Computing
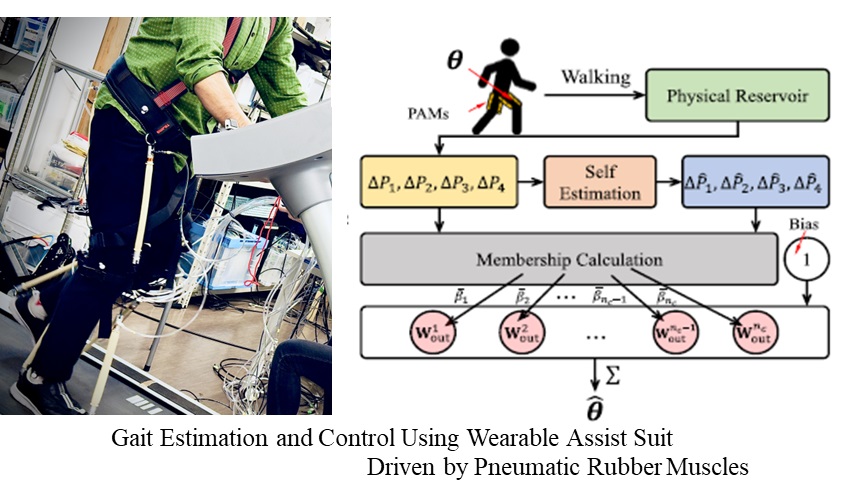
空気圧駆動ソフトロボットを用いた物理リザバー計算による状態推定
非線形分布系×センシング×リアルタイム推定
空気圧駆動の医用システムや動作支援システムにおいて,
その駆動システムの非線形な分布定数モデルをニューラルネットワークに組み込んだ形態による計算に関する研究を行っています.
その計算によって,たとえば歩行支援システムでは歩行状態を推定するアルゴリズムを検討し,推定結果をフィードバック制御に
用い ることで有効な支援を目指しています.
Hiroyuki Hayashi, Toshihiro Kawase, Tetsuro Miyazaki, Maina Sogabe, Yoshikazu Nakajima, Kenji Kawashima, Online Assistance Control of a Pneumatic Gait Assistive Suit Using Physical Reservoir Computing Exploiting Air Dynamics, IEEE International Conference on Robotics and Automation (ICRA),pp. 3245–3251, 2022
Toshihiro Kawase, Tetsuro Miyazaki, Takahiro Kanno, Kotaro Tadano, Yoshikazu Nakajima, Kenji Kawashima, Pneumatic Reservoir Computing for Sensing Soft Body: Computational Ability of Air in Tube and Its Application to Posture Estimation of Soft Exoskeleton, Sensors and Materials, Vol.33, No.8, pp.2803–2824, 2021
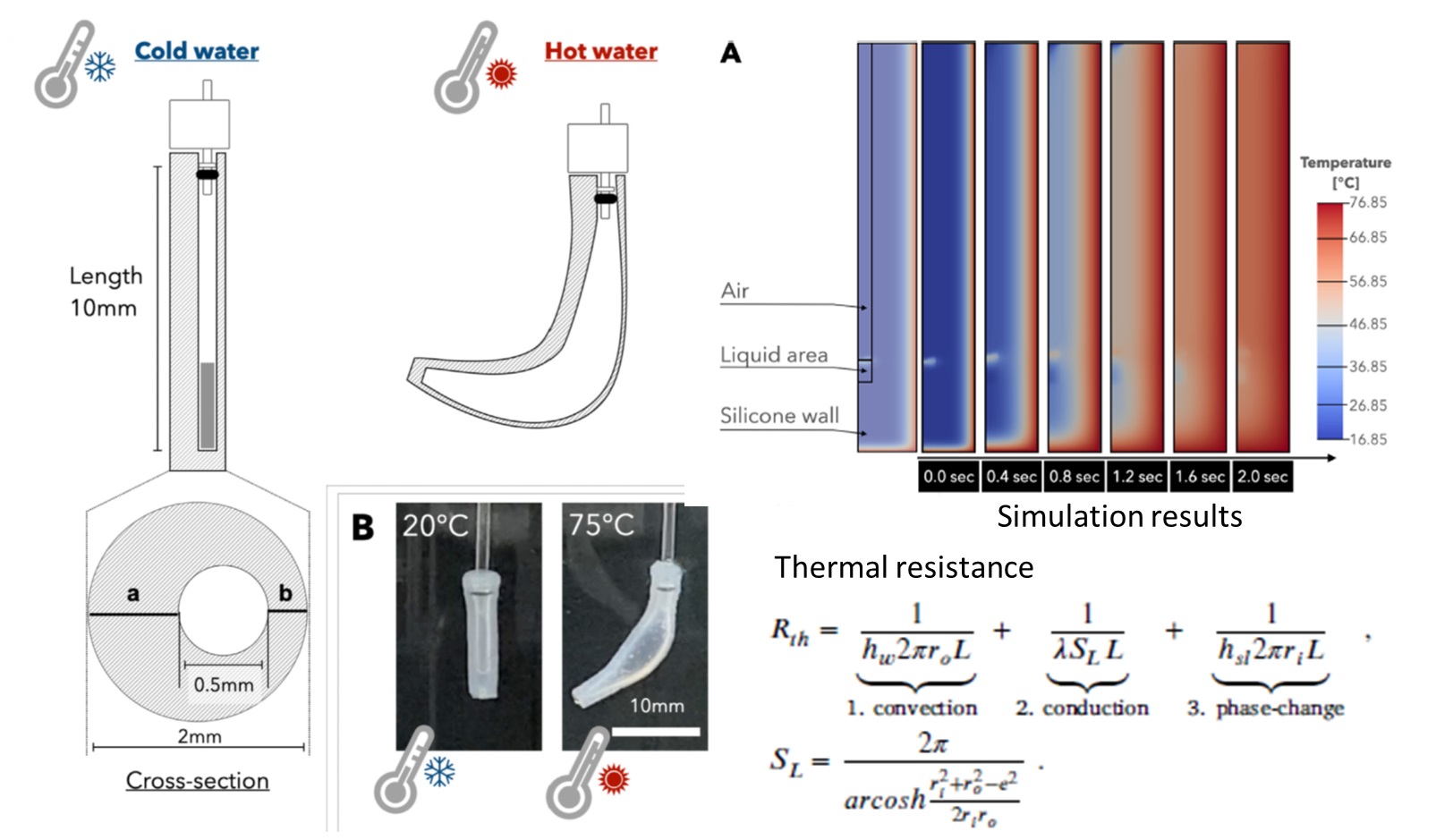
Bio-inspired Soft Actuator
ソフトアクチュエータ
機構設計×空気圧制御×医療
気液相反変化を用いるソフトアクチュエータなどを提案,それを用いた医療用デバイスの試作と制御方法の探求を行っています.
Junyi Shen, Tetsuro Miyazaki, Shingo Ohno, Maina Sogabe, Kenji Kawashima, Trajectory Tracking Control of Dual-PAM Soft Actuator with Hysteresis Compensator, IEEE Robotics and Automation Letters (RA-L), Vol.9, No.1, pp.335-342, 2024
Maina Sogabe, Florian Christoffer Uetrecht, Takahiro Kanno, Tetsuro Miyazaki, Kenji Kawashima, A Quick Response Soft Actuator by Miniaturized Liquid-to-Gas Phase Change Mechanism with environmental thermal source, Sensors and Actuators: A.Physical, Volume 361, 114587, 2023
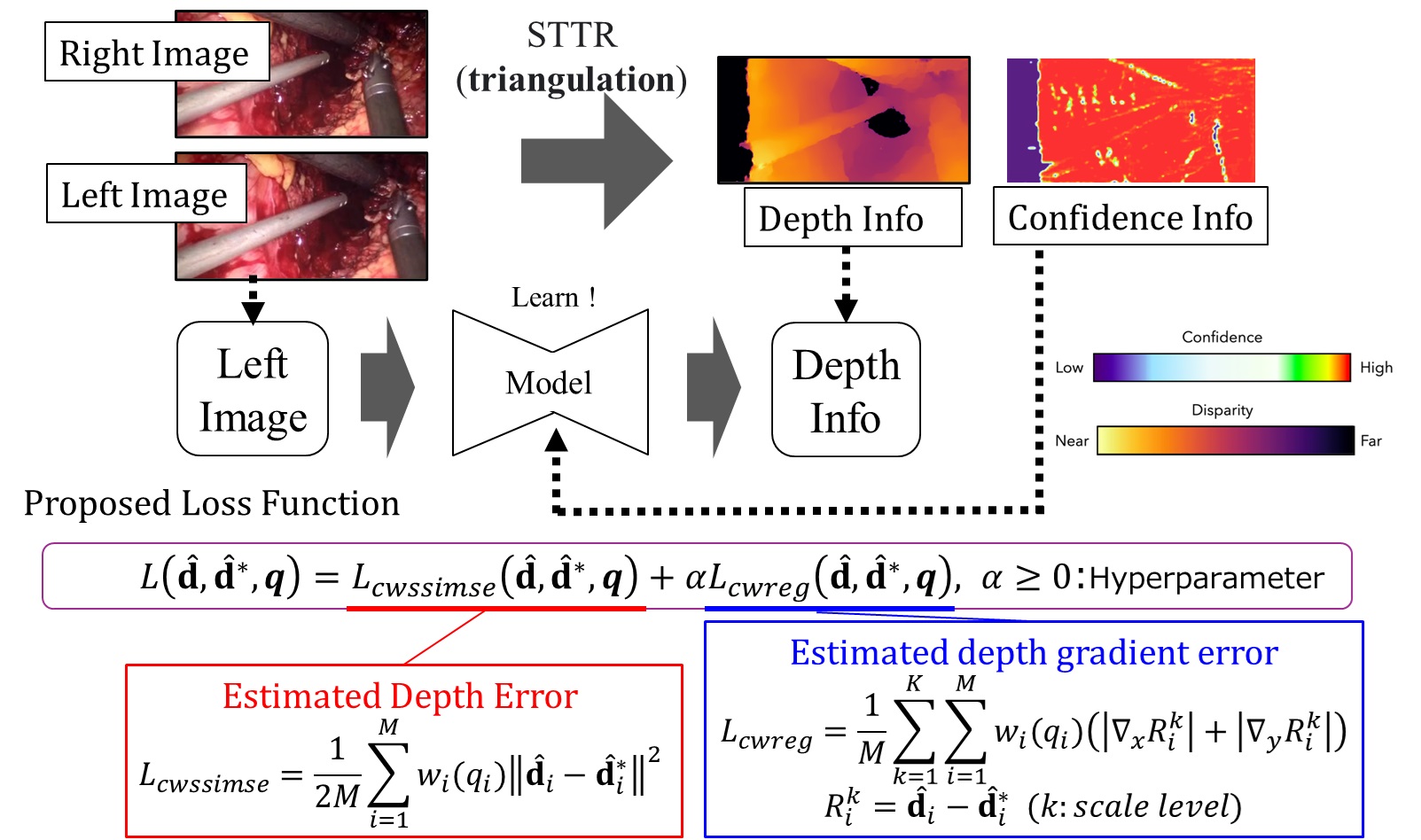
Biomedical Imaging
医療画像情報からの状態や病態の推定
センシング×制御×人間の暗黙知の抽出
生体画像のスパース性を用いた画像再構成と血栓形成時の血流動態計測精度の向上,
単眼内視鏡画像の精緻な三次元情報再構成など,医用画像にAIを用いて,ロボットの状態や臓器の病態などを推定する研究を行っています.
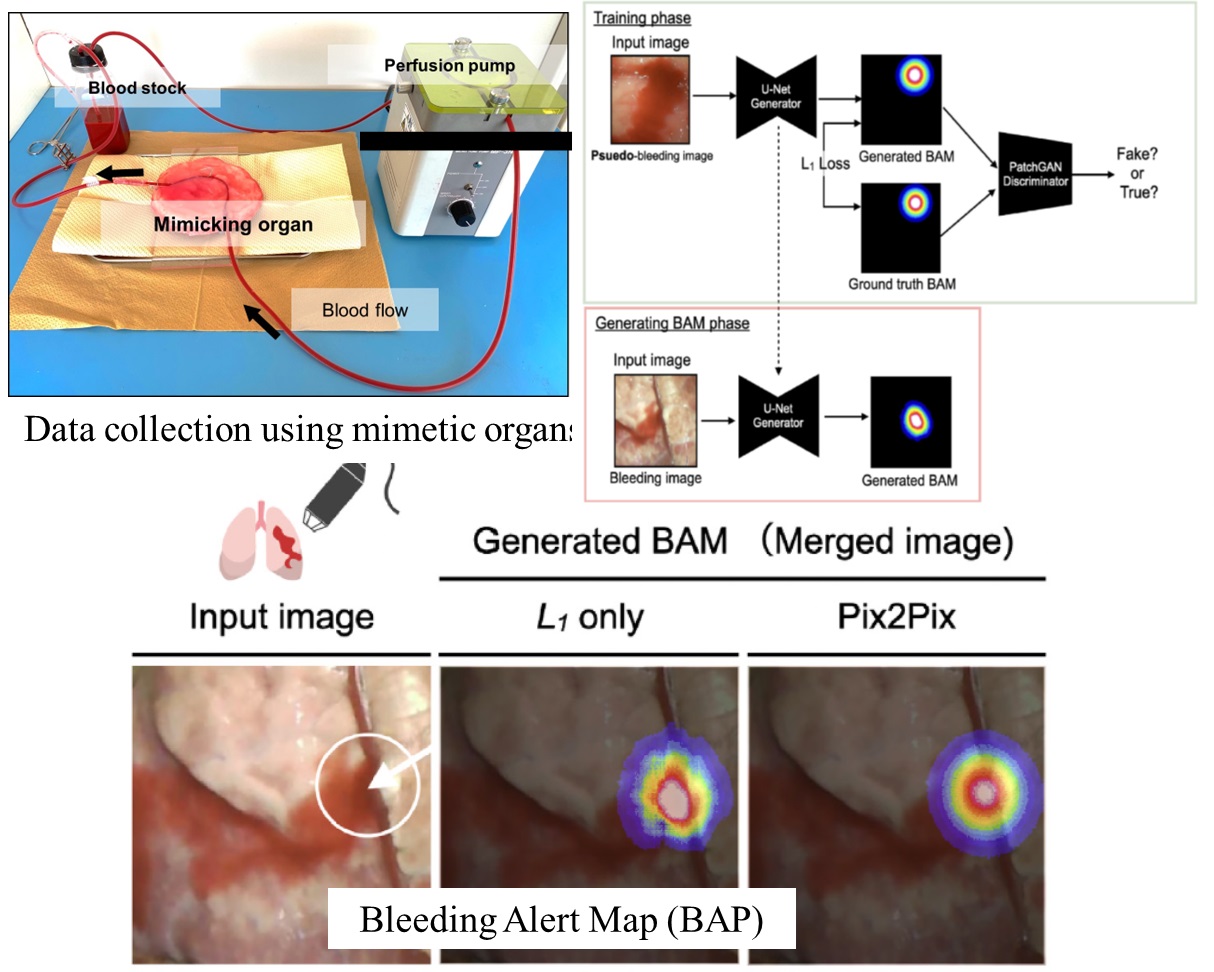
Maina Sogabe, Kaoru Ishikawa, Toshihiro Takamatsu, Koh Takeuchi, Takahiro Kanno, Koji Fujimoto, Tetsuro Miyazaki, Toshihiro Kawase, Toshihiko Sato, Kenji Kawashima, Bleeding source estimation; endoscopic surgery; Pix2Pix; training data from mimicking organs, Array,Vol.19,100308,2023
Maina Sogabe, Norihiko Ito, Tetsuro Miyazaki, Toshihiro Kawase, Takahiro Kanno and Kenji Kawashima, Detection of Instruments Inserted into Eye in Cataract Surgery Using Single-shot Multibox Detector, Sensors and Materials, Vol.34, No.1, pp.47-54, 2022