


Bio-robotic Control
Development of power assist devices using a pneumatic actuator and study of their control methods.
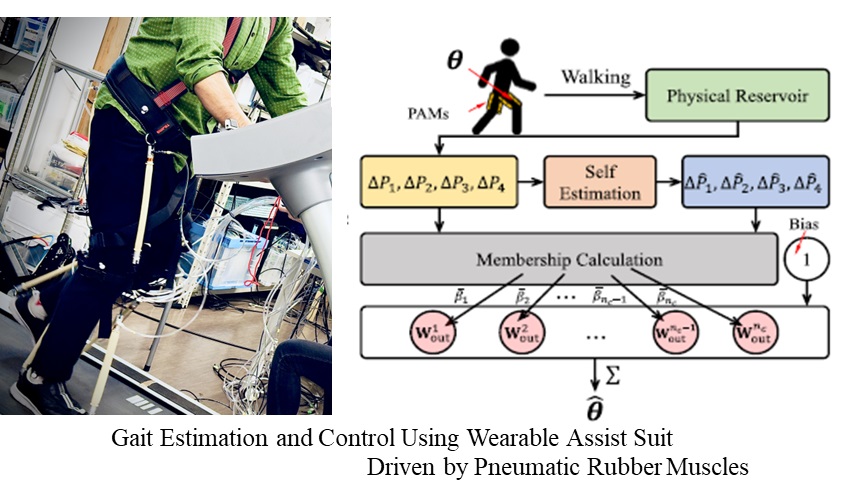
Walking assist devices using pneumatic artificial rubber muscles (PAMs) and control of the devices by gait phase detection using backdrivability of the PAMs.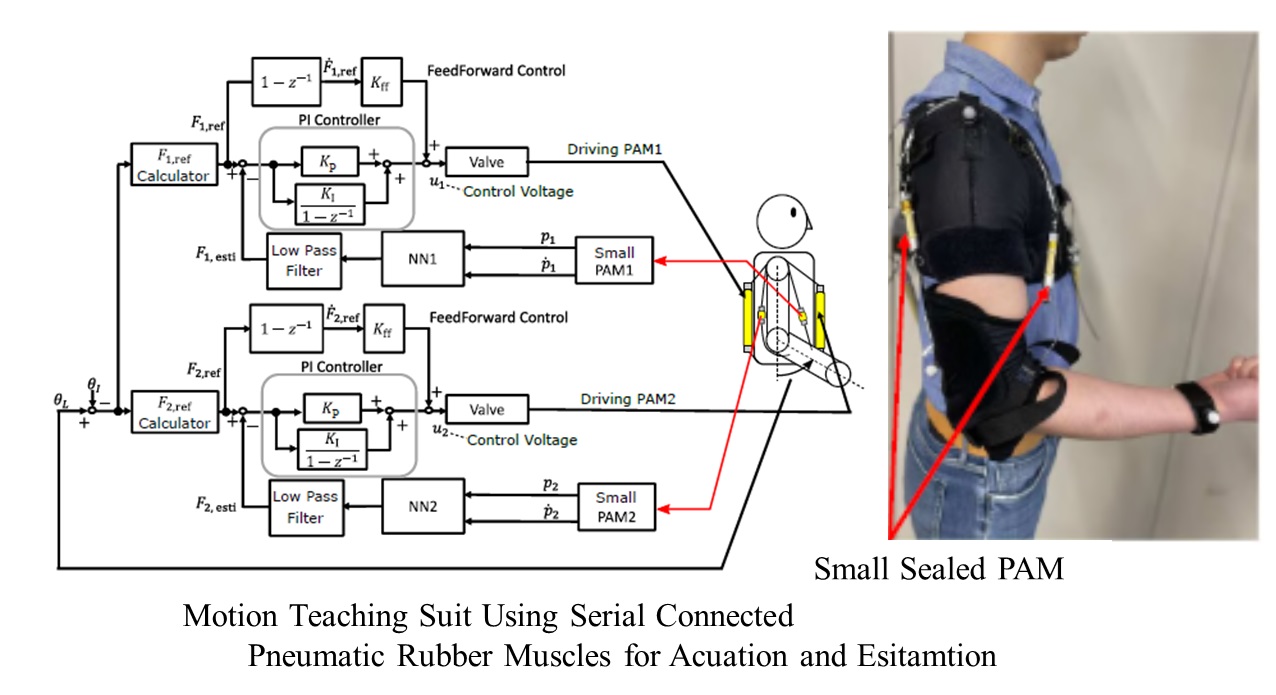
Tetsuro Miyazaki, Yoshihide Tomita and Kenji
Kawashima,
Force Control of Motion Teaching Suit Using Serial Connected
Pneumatic Artificial Muscles for Actuation and Estimation, Wearable
Technologies,
6, e10, 2025
Tetta Kadokura, Tetsuro Miyazaki, Toshihiro Kawase, Maina
Sogabe, Kenji Kawashima, Posture estimation by clustering
pressure information and control implementation for
pneumatically driven gait-assistive robot, IEEE
Access, Vol.12, pp.35874-35887, 2023
Tetsuro Miyazaki, Toshihiro Kawase, Takahiro Kanno, Maina
Sogabe, Yoshikazu Nakajima, Kenji Kawashima, Running Motion
Assistance Using a Soft Gait-assistive Suit and Its
Experimental Validation, IEEE
Access, Vol.9, pp.94700-94713, 2021
Toshihiro Tagami, Tetsuro Miyazaki, Toshihiro Kawase, Takahiro Kanno, Kenji Kawashima, Pressure Control of a Pneumatic Artificial Muscle including Pneumatic Circuit Model, IEEE Access,Vol.8,pp.60526-60538,2020
Control of surgical robot using deep learning
We propose semi-autonomous control methods of surgical robots to improve the task efficiency.
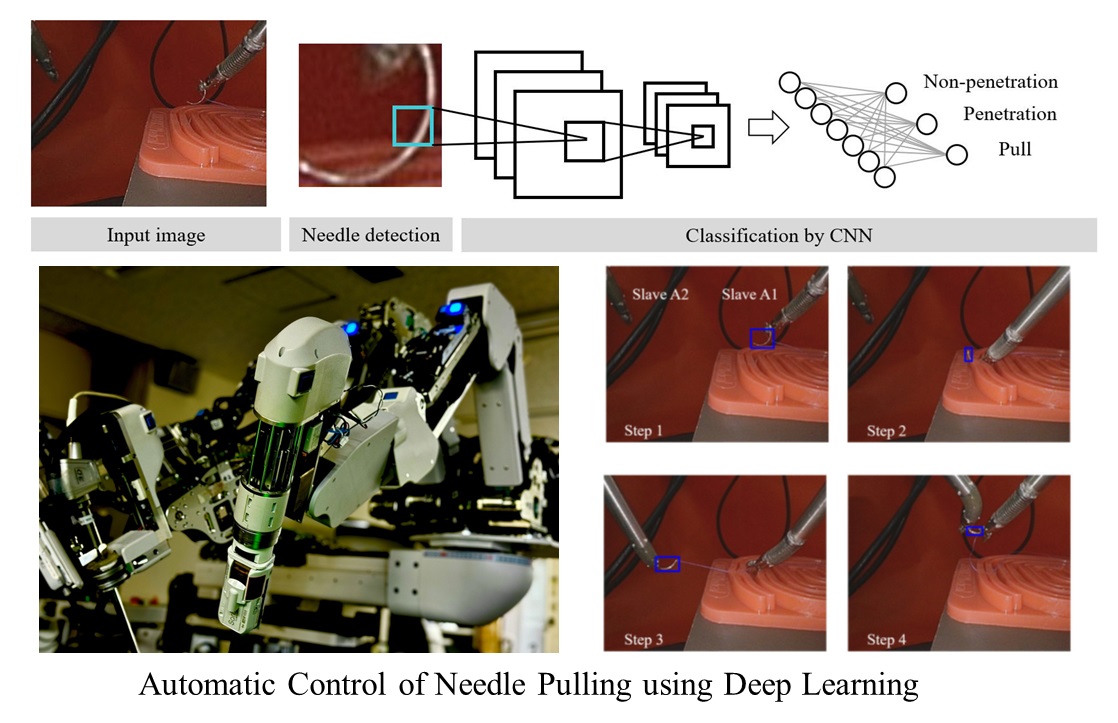
Takuto Mikada, Takahiro Kanno, Toshihiro Kawase, Tetsuro
Miyazaki, Kenji Kawashima, Suturing support by human
cooperative robot control using deep learning, IEEE
Access, pp. 167739-167746, Vol,8, 2020
Mikada Takuto, Takahiro Kanno, Toshihiro Kawase, Tetsuro
Miyazaki, Kenji Kawashima, 3D Posture Estimation of Robot
Forceps using Endoscope with Convolutional Neural Network, The
International Journal of Medical Robotics and Computer
Assisted Surgery, 16:e2062,2019
Kengo Watanabe, Takahiro Kanno, Kazuhisa Ito, Kenji Kawashima,
Single Master Dual Slave Surgical Robot with Automated Relay
of Suture Needle, IEEE
Transactions on Industrial Electronics, Vol.65, Issue 8,
pp.6343-6351, 2018
Encryption Control in Tele-operation of Surgical Assist Robot
Encrypted control is an effective method against false data injection (FDI) attacks because it can encrypt the control parameters and signals. We propose attack detection and attack cancellation methods for encrypted bilateral control systems.
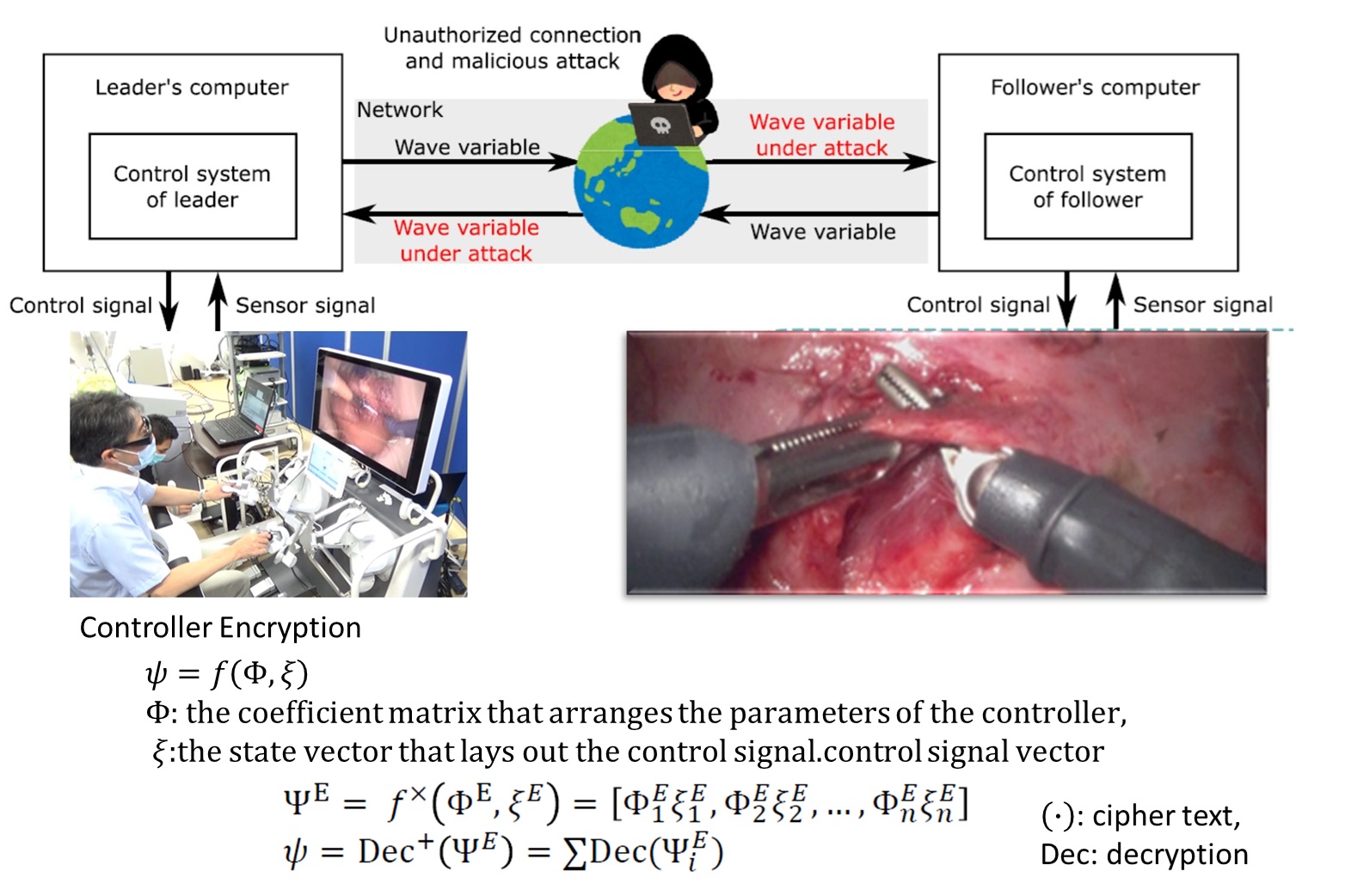
Katsumasa Kosha, Tetsuro Miyazaki, Kaoru Teranishi, Kiminao Kogiso, Kenji Kawashima, Detection and Cancellation of Multiplicative FDI Attack on Bilateral Encrypted Control System, IEEE Access, 2024
Tetsuro Miyazaki, Naoto Shono, Kaoru Teranishi, Takahiro Kanno, Toshihiro Kawase, Kiminao Kogiso, Kenji Kawashima, Attack detection method for encrypted wave-variable-based bilateral control systems, IET Control Theory & Applications, pp.1–14, 2024
Physical reservoir computing with a pneumatic network
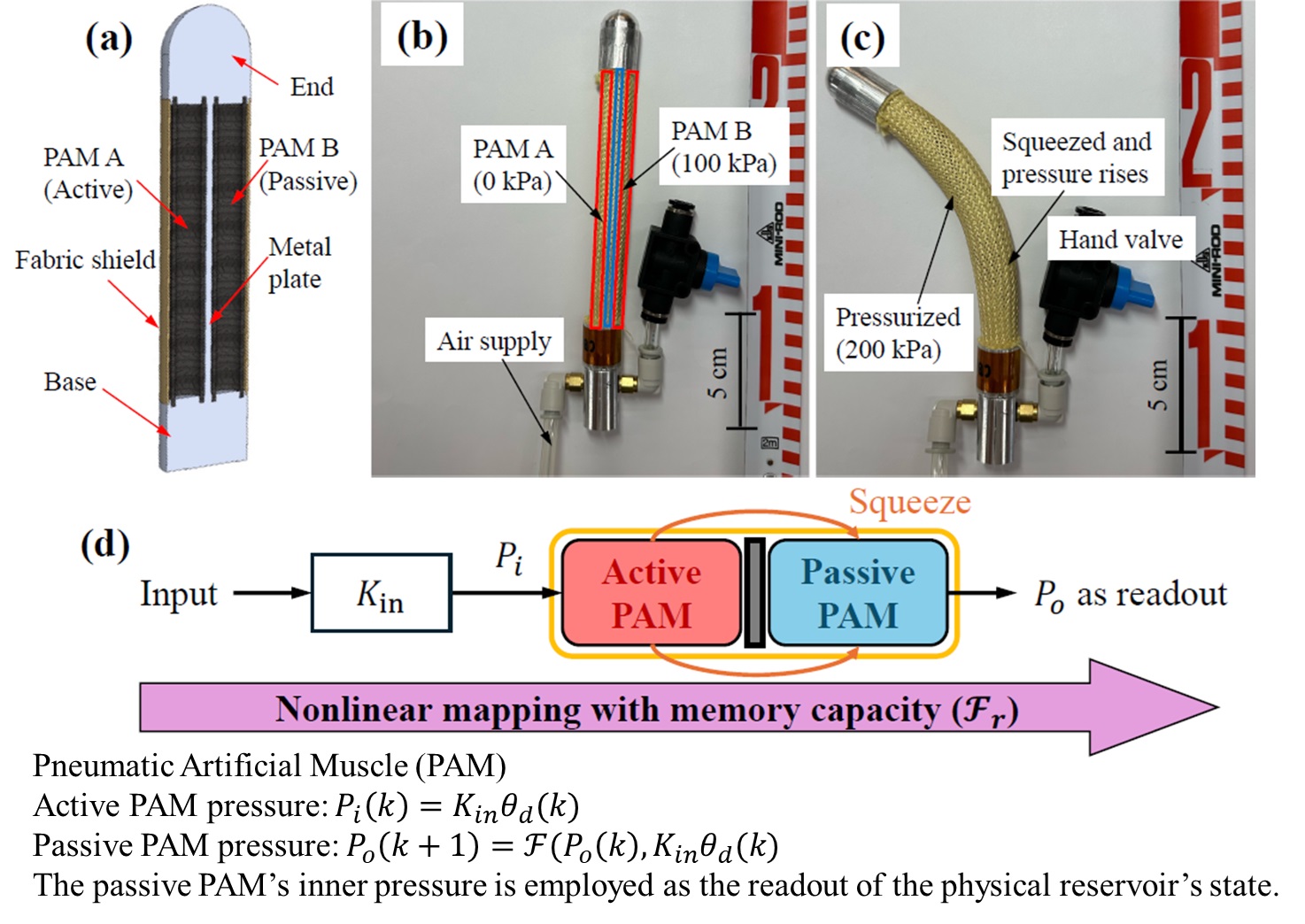
Hiroyuki Hayashi, Toshihiro Kawase, Tetsuro Miyazaki, Maina Sogabe, Yoshikazu Nakajima, Kenji Kawashima, Online Assistance Control of a Pneumatic Gait Assistive Suit Using Physical Reservoir Computing Exploiting Air Dynamics, IEEE International Conference on Robotics and Automation (ICRA),pp. 3245–3251, 2022
Toshihiro Kawase, Tetsuro Miyazaki, Takahiro Kanno, Kotaro Tadano, Yoshikazu Nakajima, Kenji Kawashima, Pneumatic Reservoir Computing for Sensing Soft Body: Computational Ability of Air in Tube and Its Application to Posture Estimation of Soft Exoskeleton, Sensors and Materials, Vol.33, No.8, pp.2803–2824, 2021
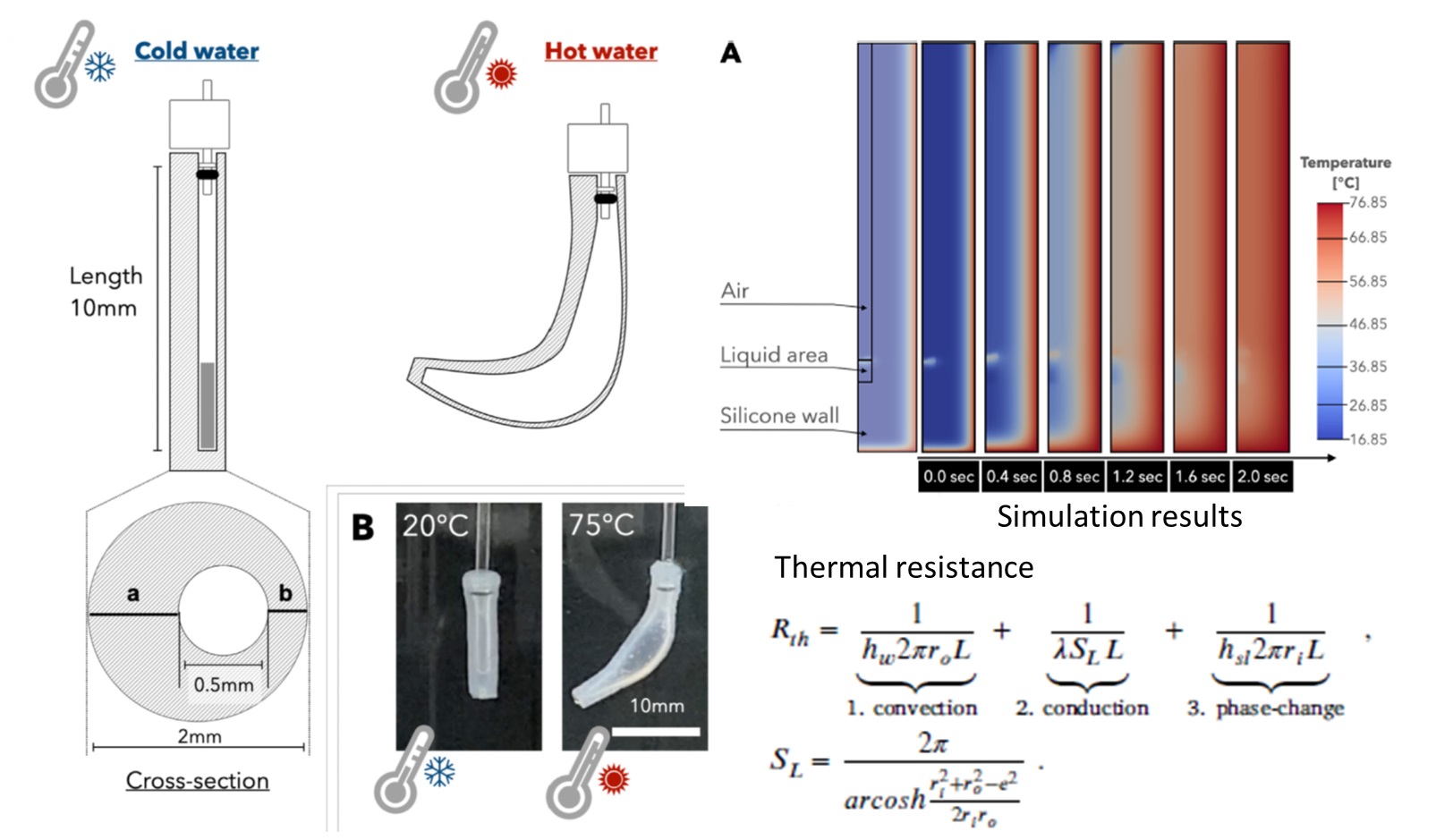
Bio-inspired soft actuators
Soft actuator by liquid-to-gas phase change mechanism with
environmental thermal source
Control of bending type pneumatic artificial rubber muscle
Junyi Shen, Tetsuro Miyazaki, Shingo Ohno, Maina Sogabe, Kenji Kawashima, Trajectory Tracking Control of Dual-PAM Soft Actuator with Hysteresis Compensator, IEEE Robotics and Automation Letters (RA-L), Vol.9, No.1, pp.335-342, 2024
Maina Sogabe, Florian Christoffer Uetrecht, Takahiro Kanno, Tetsuro Miyazaki, Kenji Kawashima, A Quick Response Soft Actuator by Miniaturized Liquid-to-Gas Phase Change Mechanism with environmental thermal source, Sensors and Actuators:A.Physical,Volume 361, 114587, 2023